
Напечатал на 3d принтере корпус

Электроника для лодок и яхт.
Еще толком не отмыл новую версию, но результат на лицо 🙂
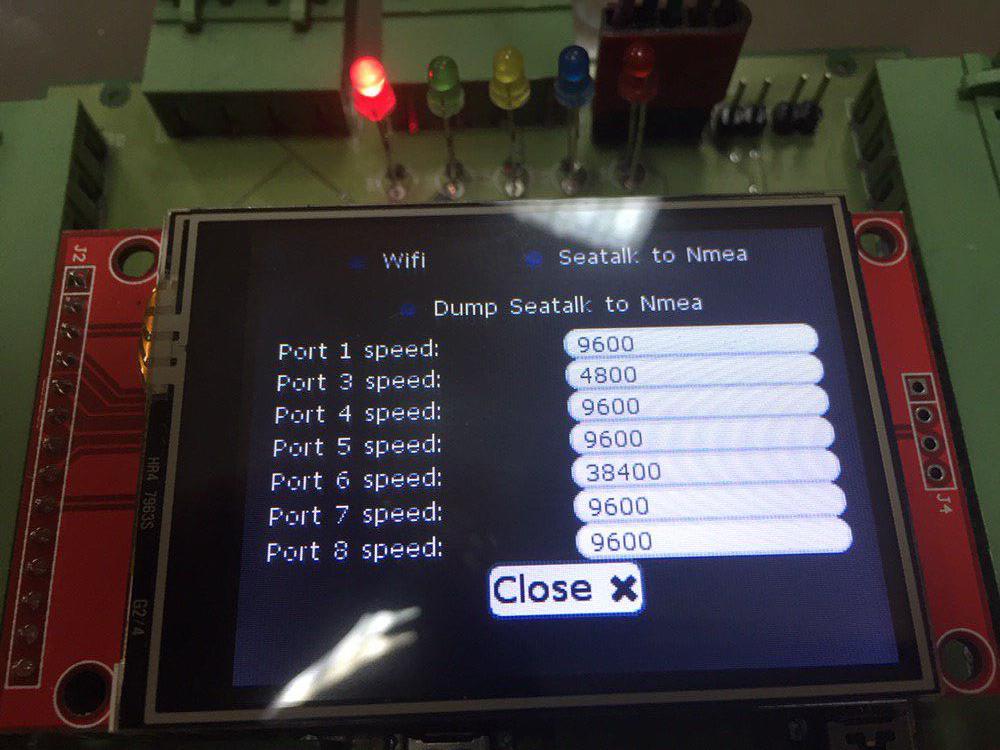
Чего же там поменялось и обновилось?! Исправил ошибки в предыдущей версии, вывел дебаг порт, добавил возможность подключить TFT дисплей 2.4″ с тач скрином. Заменил микросхему памяти на более вечную, теперь я не лимитирую себя кол-вом записи в нее, буду использовать это для сохранения всех состояний, координат и т.д. для быстрого выхода в режим мультиплексора.
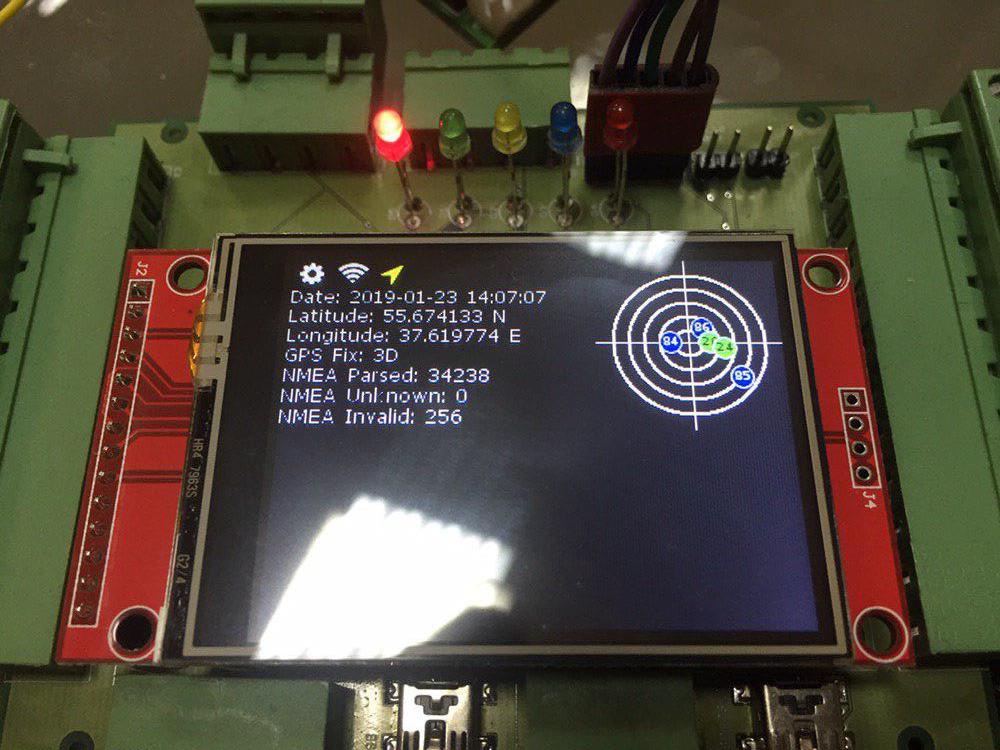
Вид с экраном:
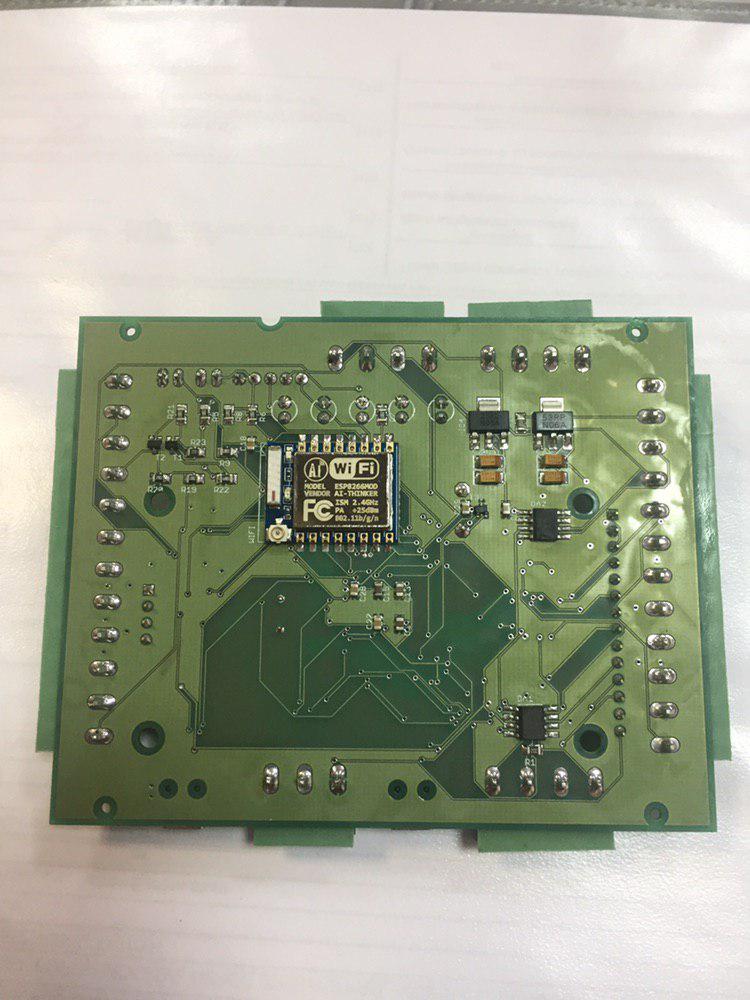
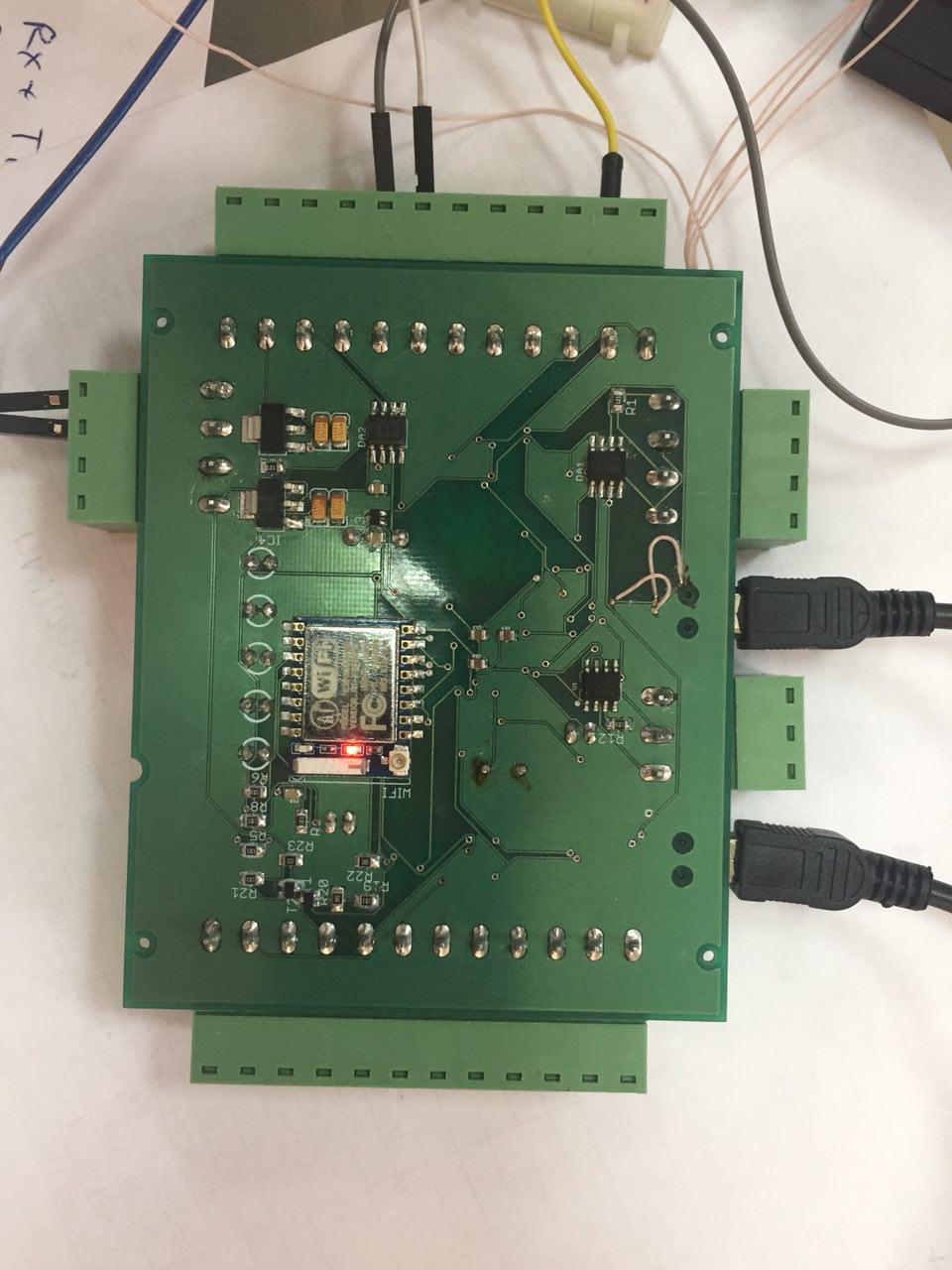
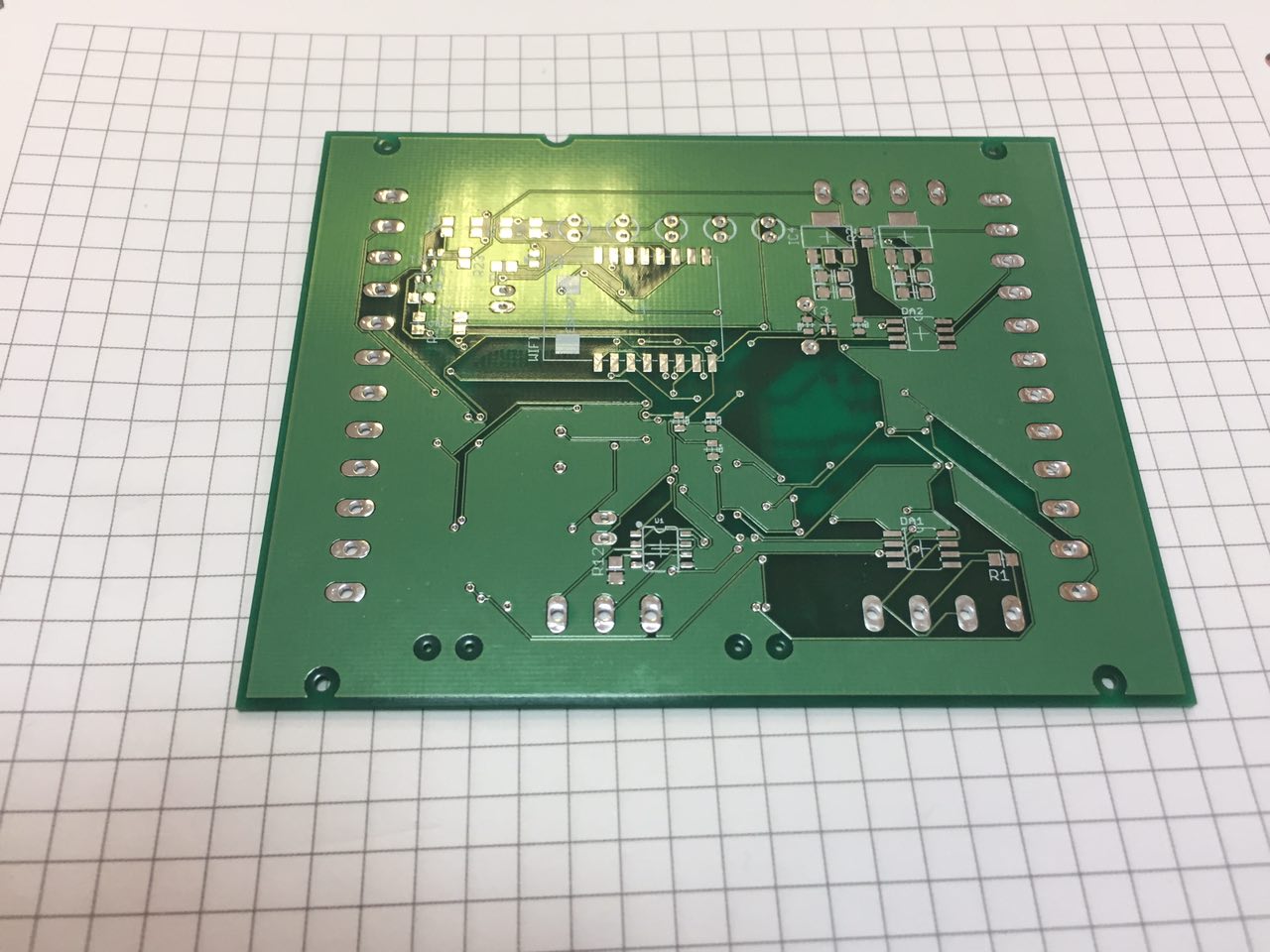
Нижняя часть, на ней видны WIFI модуль, стабилизаторы напряжения, два конвертора для CAN шины, ну и по мелочи.
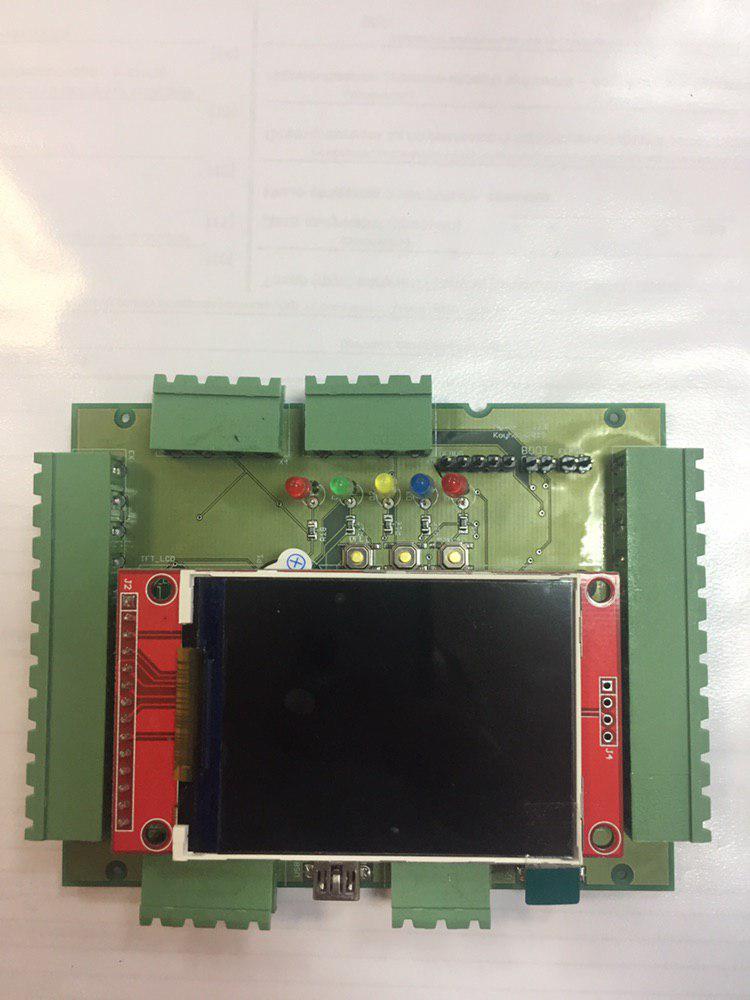
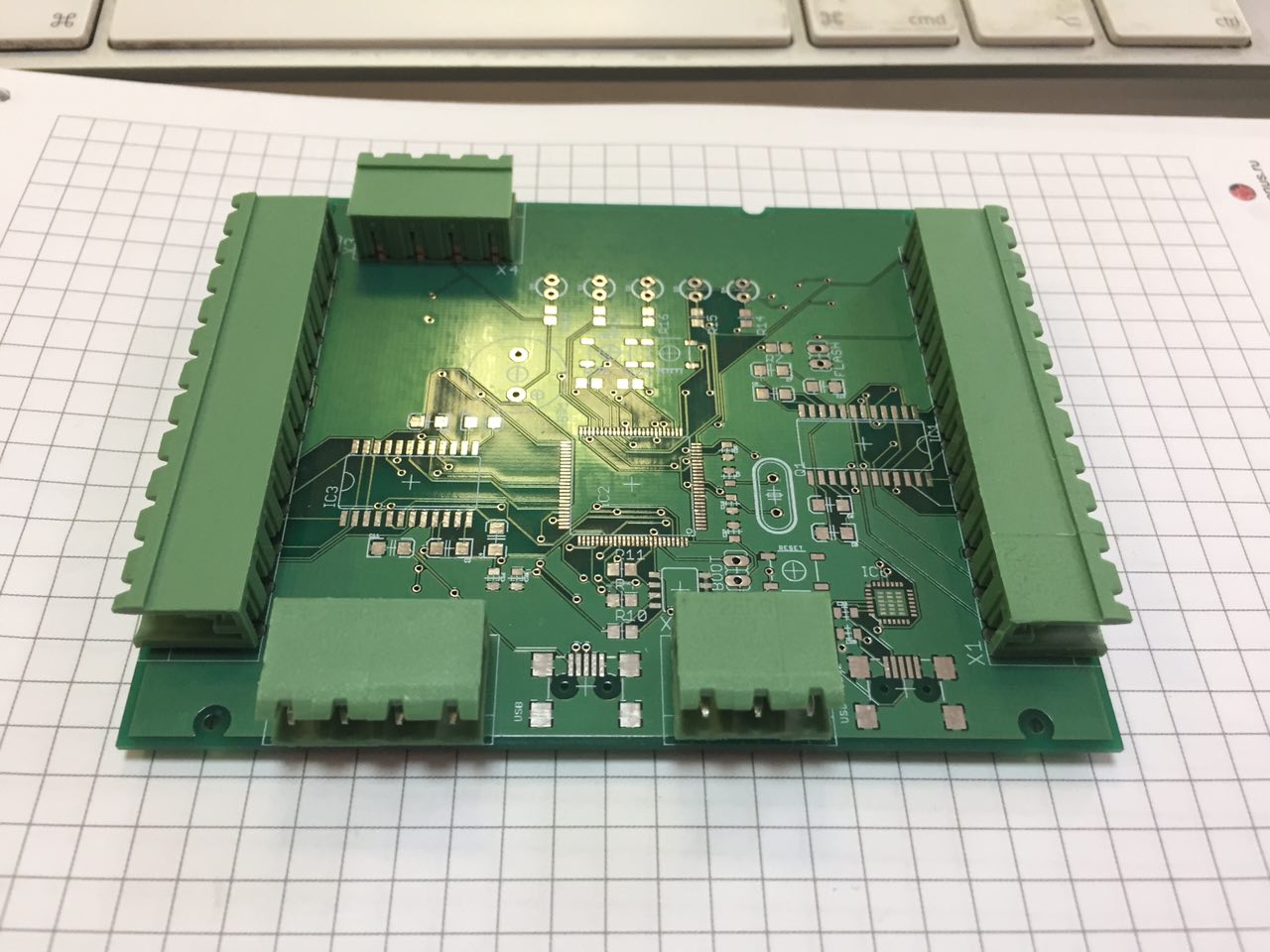
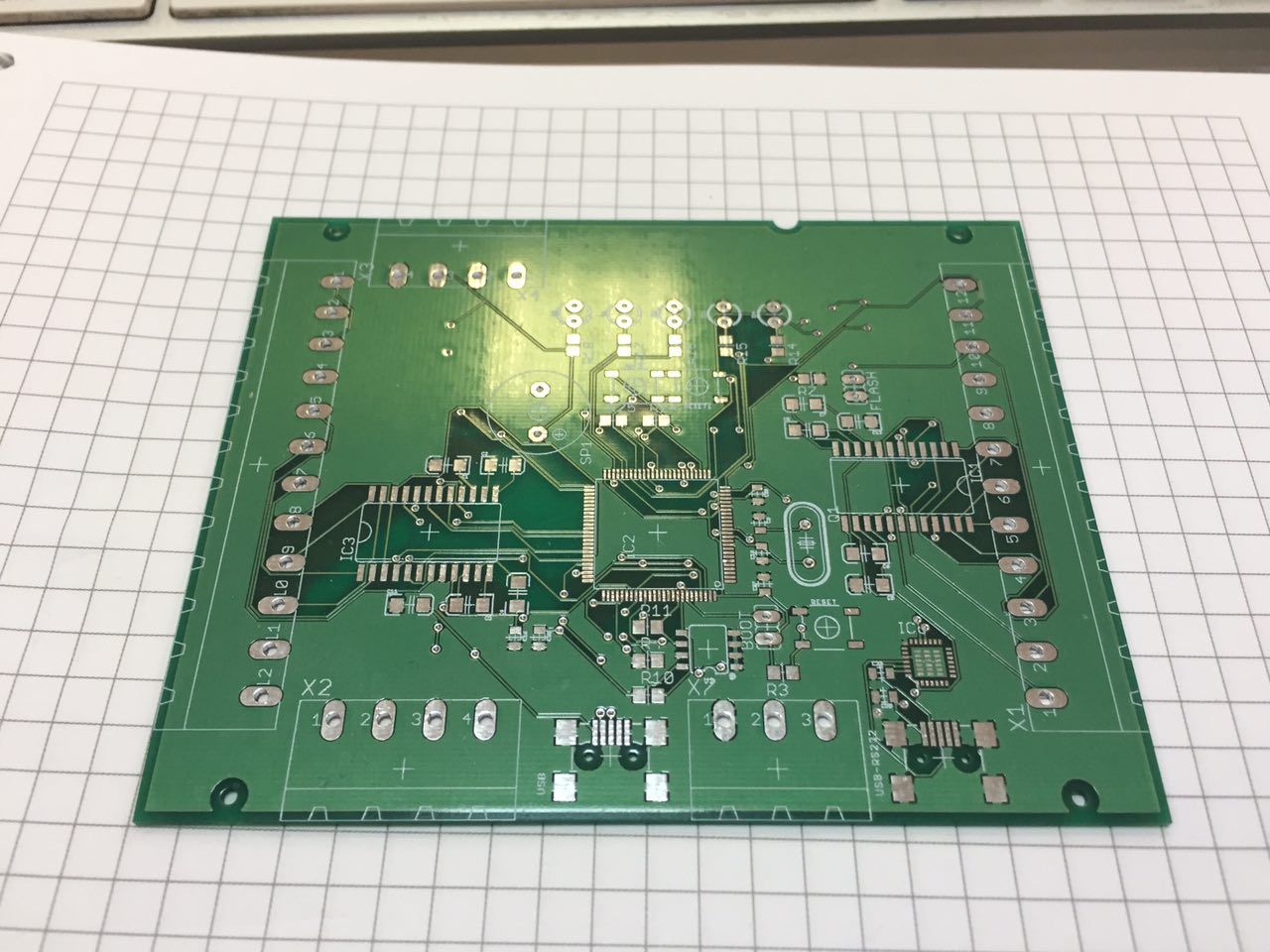
Вид сверху, без экрана:

Давно не писал, не было времени, вел другие разработки, учет энергии и управление ресетами, об этом расскажу позднее.
На тему мультиплексера, нашел еще один косяк разводки, я подал Sealtalk не через согласующую микросхему, а на прямую в stm32 и как результат спалил ее 🙂 пришлось сдувать и ставить новую. После чего я увидел бинарный протокол Seatalk, точнее я подключил GPS с интерфейсом Seatalk и полетело куча инфы от него, честно говоря конечно там много чего, но Nmea как-то больше френдли, пока размышляю да какой степени надо миксовать порты разными протоколами, так как чтобы выдать что-то из Seatalk в Nmea надо сначала собрать разную информацию и только потом набрав ее можно траслировать ее в Nmea.
В принципе все получается, даже нарисовал новую плату с учетом изменений и косяков, осталось проверить can-bus, но пока не дошли руки, хотя Nmea 2000 вроде как актуален уже давно, да и новый Seatalk тоже.
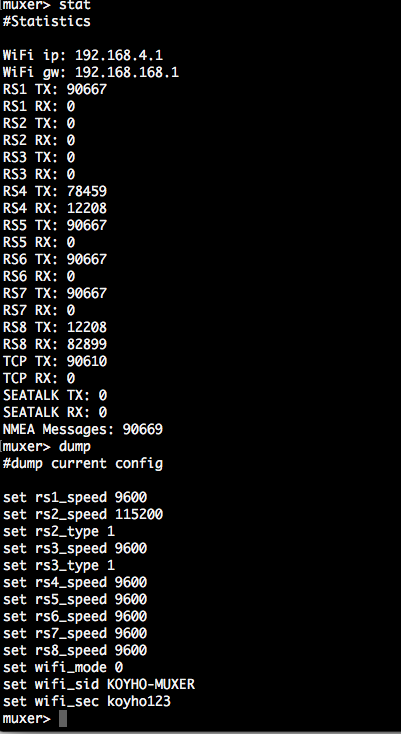
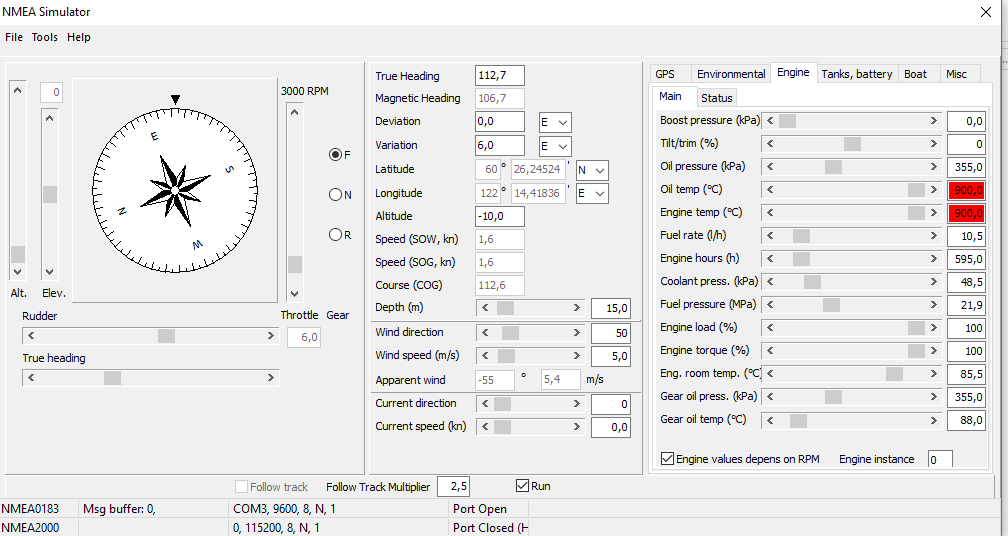
Вывод консольки, сейчас в RS8_TX подключен GPS, в RS4_TX подключен NMEA Simulator, он там кучу всего шлет, сейчас придет мне переходник USB2CAN и в симуляторе еще NMEA 2000 начну микшировать.
И так у меня дошли руки и я спаял плату.
Ну и куда же без косяков 🙂 При разводке платы перепутал на одном из USB DP и DM 🙂 И забыл смое главное, на фото видны проводочки, это SWD интерфейс для разработки 🙂 Пока на вскидку, больше косяков не на нашел.

И так чего имеем:
На текущий момент сделал:
Осталось отладить и запустить:
Как-то у моего друга возникла проблема на лодке, даже не то чтобы возникла, а мы с ним побывали в ситуации, когда ну точно надо иметь AIS приемник.
Исследовав просторы интернета и битвы с нашей таможней был куплен мультиплексор от Brookhouse. Но пока бились с доставкой и таможней руки зачесались и был создан прототип, фотки ниже прикрутил.
Заложил следующие возможности:
Так же заложил 5 светодиодов, один из них это питание, остальные сигнальные.
На борту есть EEPROM, настройки будем помнить без питания.
Все комплектующие получил, вот только руки не дойдут все это припаять, надеюсь в следующем отчете можно будет увидеть уже собранную плату и я приступлю к реализации программной части.
Добрались таки руки чтобы развернуть сайтик.
На нем буду писать все связанное с электроникой которую делаю своими руками для лодок или яхт.